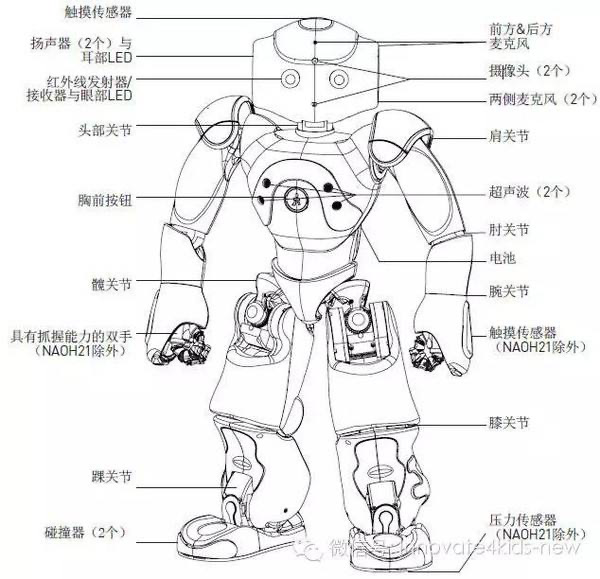
nao机器人身高58厘米,体重5.4kg。硬件主要包括CPU,主板,扬声器,麦克风,红外线,相机,超声波,传感器,电机,语音合成器,陀螺仪。
运动模型:
使用的坐标系(笛卡尔坐标系),沿z轴方向的旋转称为偏转(Yaw),沿y轴方向的旋转称为俯仰(Pitch),沿着x轴方向的旋转称为横滚(Roll),沿关节轴逆时针转动角度为正,顺时针为负。
关节命名规则:
部件名+动作名。
对于头部而言,轴是围绕着(y,z旋转的,所以为headpitch或headYaw)。
关节的运动范围:
每个关节都有自己的运动范围,例如:headpitch在[-38.5,29.5]之间,headYaw在[-119.5,119.5]之间。
全身关节的命名:
对于抬臂这个动作而言,向前抬臂和向右抬臂,就是围绕着y,x轴旋转,所以命名为:RShoulderPitch和RSoulderRoll。
nao机器人的自由度:
机器人能够独立运动的关节数目,称为机器人的运动自由度,简称自由度(Degree of Freedom,DOF)
nao机器人联网步骤:
1.利用以太网网线将NAO机器人与计算机或交互机连接。
2.开机,按胸前按钮。
3.读机器人ip地址。
4.打开浏览器(推荐firefox)用户名密码均为nao。
5.在无限路由器中选择路由器名称,输入密码并连接。
6.拔掉网线,按胸前按钮,让NAO报出当前IP地址。
远程登录NAO:
利用winscp输入NAO的IP地址,并进入。